Unikanie przeszkód
Cel ćwiczenia:
- Nauka wykorzystania czujnika utradźwiękowego do kontroli jazdy robota Maqueen.Efekt:
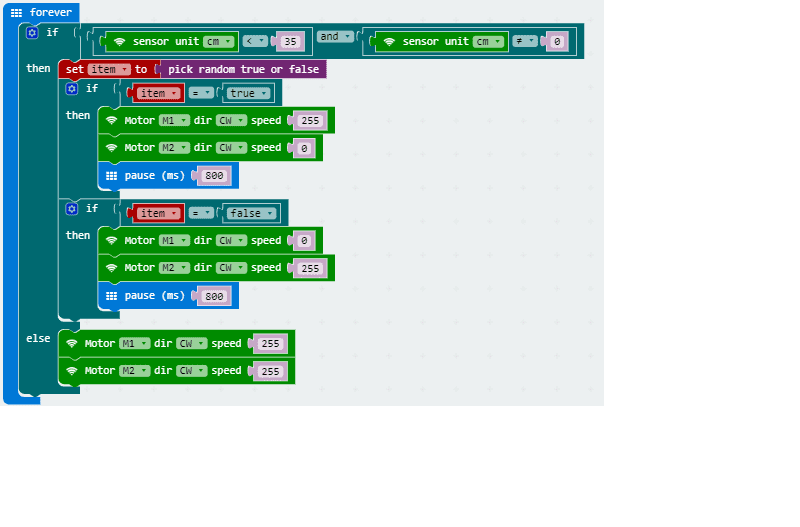
- Czujnik utradżwiękowy sprawdza odległość pomiędzy robotem a najbliższą przeszkodą przed nim. Jeżeli odległość jest mniejsza niz 35 cm Maqueen losowo wybiera obrót w lewo lub prawo w celu ominięcia przeszkody.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_Fa4Ef3DwyXW7
Zrzut ekranu z kodem programu Makecode: