- Menu
- Kontrola silników
- Diody RGB zmieniające gradientowo kolory
- Migające diody LED
- Odczyt odległości za pomocą czujnika utradźwiękowego
- Odczyt kodów przypisanych do przycisków pilota IR
- Kontrola robota za pomocą pilota IR
- Śledzenie linii
- Unikanie przeszkód
- Robot sterowany światłem
- Bezprzewodowy kontroler micro: Gamepad i Maqueen
Import biblioteki Maqueen do Makecode
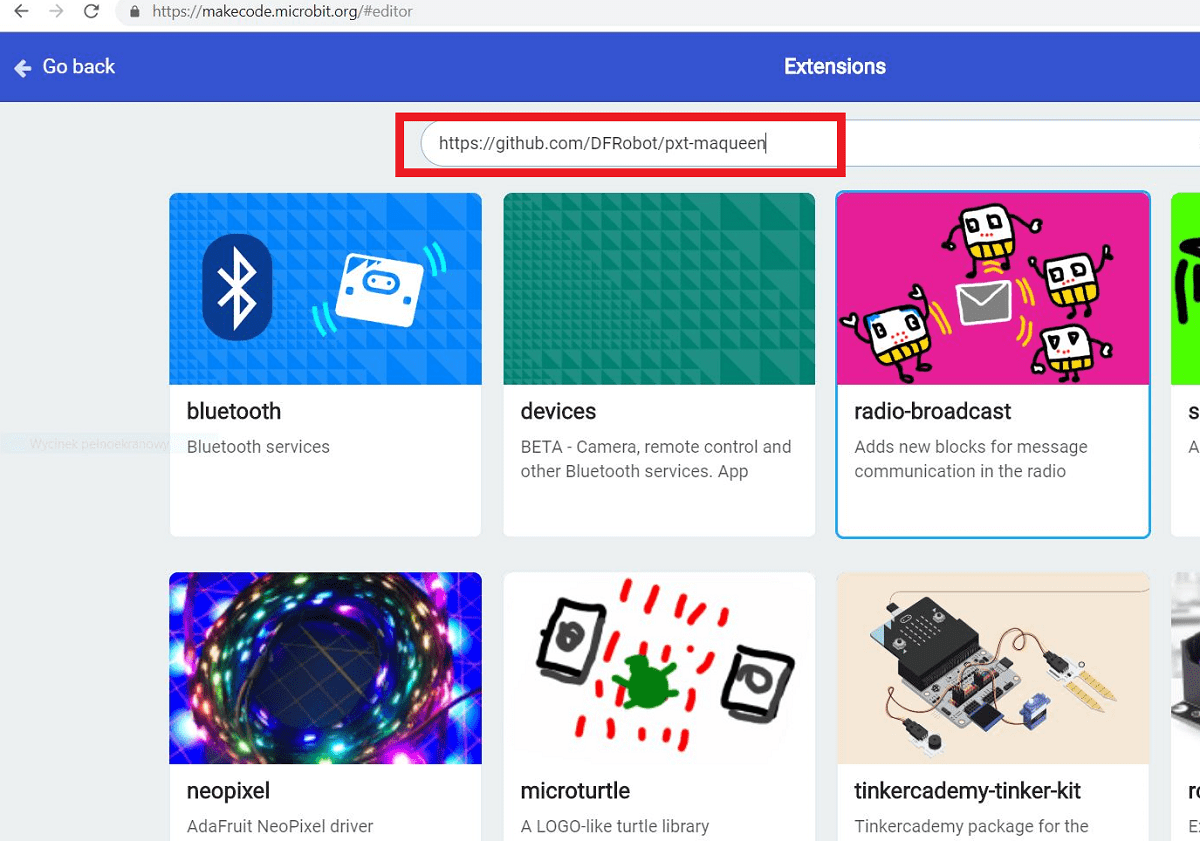
Skopiuj do schowka adres biblioteki Maqueen: https://github.com/DFRobot/pxt-maqueen
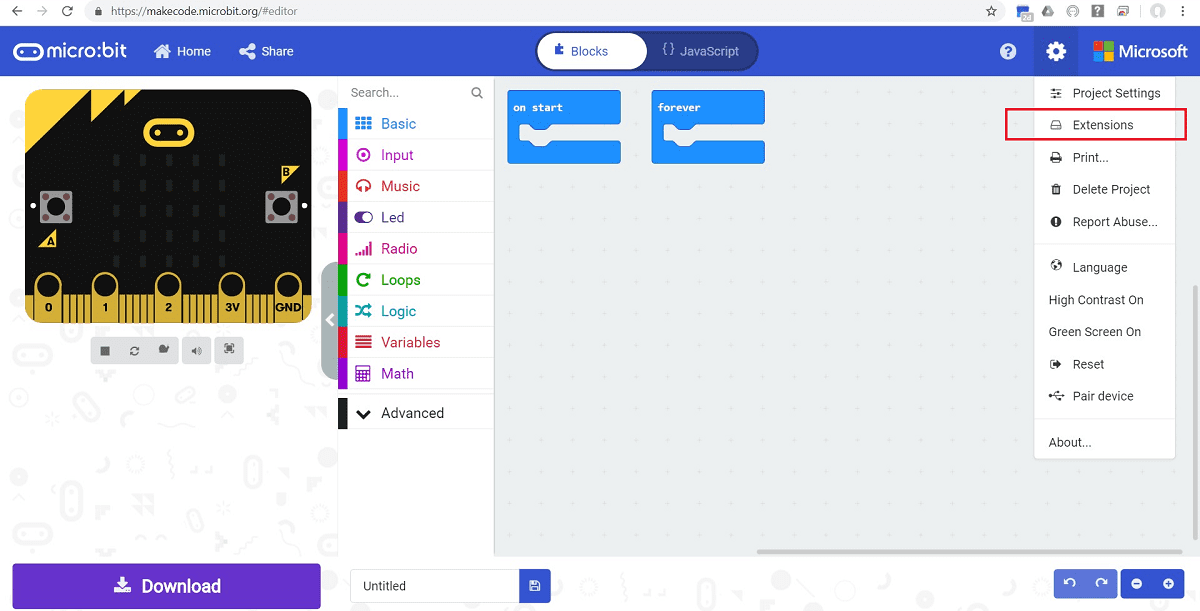
Kliknij na link: makecode.microbit.org, aby włączyć platformę MakeCode do programowania online (uwaga: pierwszy raz może to chwilę potrwać, poczekaj na uruchomienie platformy)
Zaimportuj bibliotekę Maqueen:
kliknij na ikonkę ustawień i potem na „Extensions”
w pole wyszukiwania wklej ze schowka skopiowany adres biblioteki Maqueen
Kliknij na kafelku biblioteki Maqueen
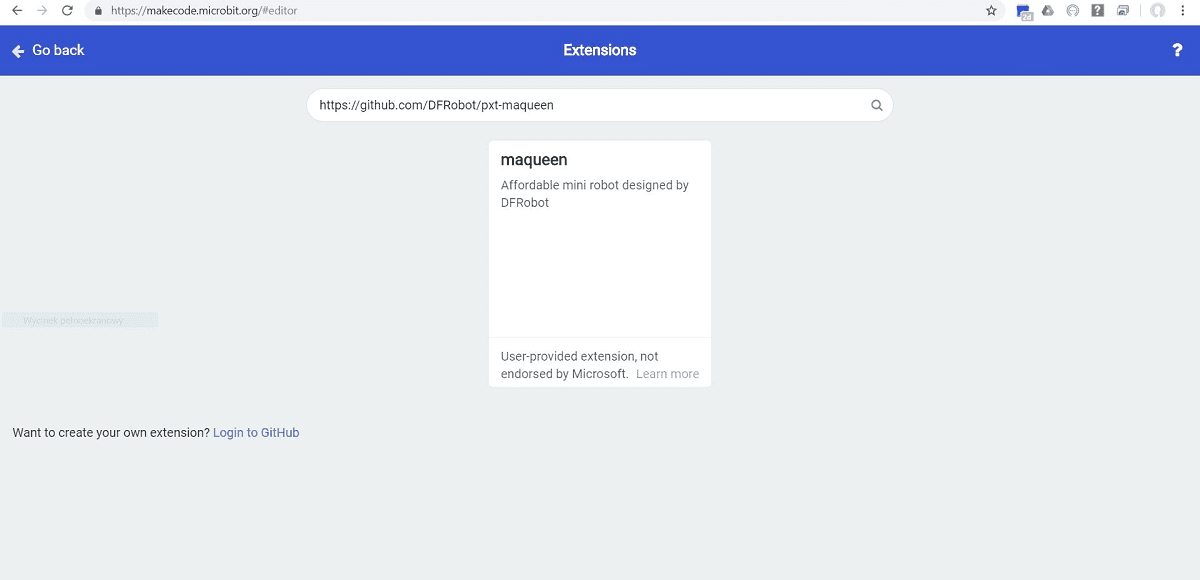
W menu MakeCode pojawi się biblioteka Maqueen
W ten sam sposób można włączyć do Makecode biblioteki dotyczące innych produktów DFRobot:
Kontroler programowalny micro:Gamepad: https://github.com/DFRobot/pxt-gamePad
Karta rozszerzenia micro:Circular RGB LED dla micro:bit: microsoft/pxt-neopixel
Przykłady programów w Makecode
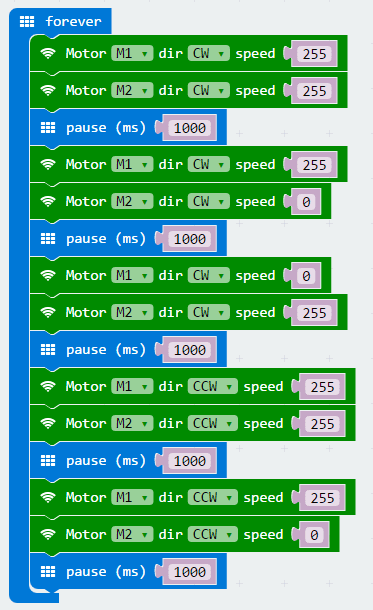
Kontrola silników
Cel ćwiczenia:
- Nauka kontrolowania silników i sterowania robotem Maqueen.Efekt:
- Maqueen kolejno porusza się do przodu przez 1 sekundę, skręca w prawo przez 1s., skręca w lewo przez 1s., porusza się do tyłu przez 1s, cofa się i jednocześnie skręca w prawo przez 1 s.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_2Cc9gM5P5aDs
Zrzut ekranu z kodem programu Makecode:
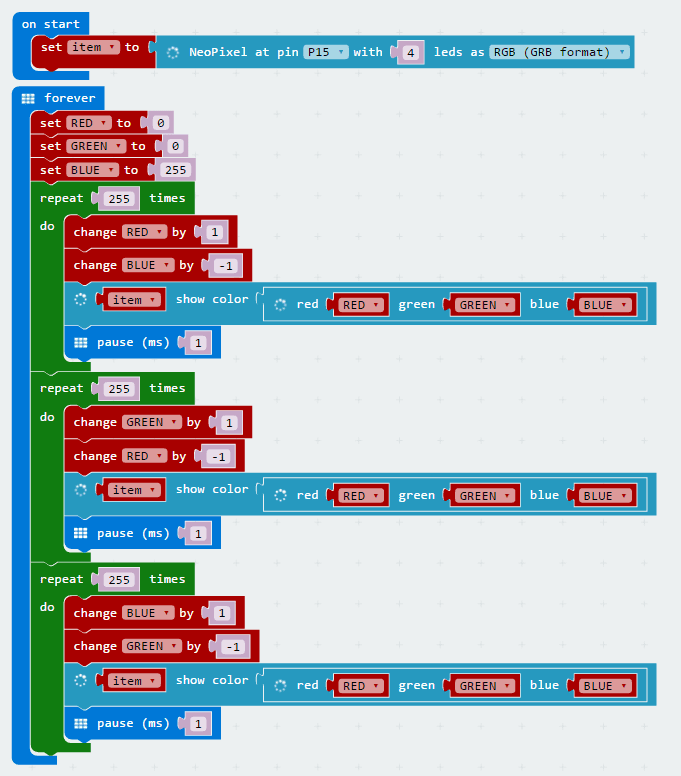
Diody RGB zmieniające gradientowo kolory
Cel ćwiczenia:
- Nauka podstawowych sposobów użycia w programowaniu diod RGB.Efekt:
- Diody RGB na spodzie robota Maqueen świecą paletą barw i pokazują efekt gradientu.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_WkgPLpAotP3f
Zrzut ekranu z kodem programu Makecode:
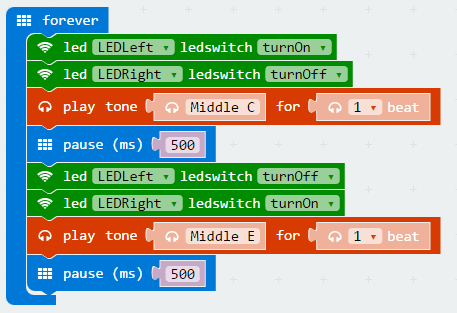
Migające diody LED
Cel ćwiczenia:
- Nauka programowania diod LED i brzęczyka Maqueen.Efekt:
- Lewa i prawa dioda LED miga na zmianę, brzęczyk emituje dwa różne tony z częstotliwością 500ms.

Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_6gKRm1RVsDxY
Zrzut ekranu z kodem programu Makecode:
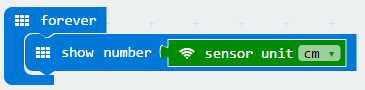
Odczyt odległości za pomocą czujnika utradźwiękowego
Cel ćwiczenia:
- Odczyt odległości za pomocą czujnika ultradźwiękowego do wykorzystania uzyskanych danych w różnych innych projektach.Efekt:
- Czujnik utradźwiękowy mierzy odległość od przeszkody. Odległość ta w czasie rzeczywistym jest wyświetlana na ekranie diodowym micro:bit (w centymetrach).
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_4gi4Dj7yTWgK
Zrzut ekranu z kodem programu Makecode:
Odczyt kodów przypisanych do przycisków pilota IR
Cel ćwiczenia:
- Nauka przypisania kodów haksadecymalnych sygnałów przycisków pilota IR, do wykorzystania w różnych projektach.Efekt:
- Po nakierowaniu pilota IR na czujnik podczerwieni znajdujący się z przodu robota Maqueen I naciśnięciu konkretnego przycisku na pilocie na wyświetlaczu diodowym micro:bit wyświetlane są dwie ostatnie cyfry kodu heksadecymalnego, odpowiadającego temu przyciskowi.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_361V7bbp0UAg
Zrzut ekranu z kodem programu Makecode:
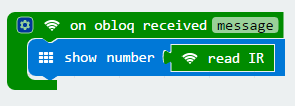
Tabela kodów haksadecymalnych przypisanych do przycisków pilota IR.
Przypisane do przycisków pilota kody haksadecymalne są konwertowane na dziesiętne w następujący sposób: ostatnie dwie cyfry kodu heksadecymalnego są konwertowane na liczby w układzie dziesiętnym.
Przycisk pilota: | Przypisany kod haksadecymalny |
Power | 0xff00 |
VOL | 0xfe01 |
FUNC/STOP | 0xfd02 |
Left | 0xfd04 |
Pause | 0xfa05 |
Right | 0xf906 |
Down | 0xf708 |
VOL- | 0xf609 |
Up | 0xf50a |
0 | 0xf30c |
EQ | 0xf20d |
ST/REPT | 0xf10e |
1 | 0xef10 |
2 | 0xee11 |
3 | 0xfa05 |
4 | 0xeb14 |
5 | 0xea15 |
6 | 0xe916 |
7 | 0xe718 |
8 | 0xe619 |
9 | 0xe51a |
Kontrola robota za pomocą pilota IR
Cel ćwiczenia:
- Nauka jak użyć pilota IR do sterowania ruchem robota Maqueen.Efekt:
- Sterowanie ruchem Maqueena w przód, lewo, prawo i do tyłu za pomocą klawiszy 2,4,6,8 pilota IR.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_MfDXhX6MM35X
Zrzut ekranu z kodem programu Makecode:
Śledzenie linii
Cel ćwiczenia:
- Zastosowanie czujników dolnych Maqueen do kontroli zdarzeń w trakcie ruchu.Efekt:
- Maqueen śledzi czarną linię narysowaną na podłożu i porusza się po niej do przodu.
![]()
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_1VzX7LLAC3im
Zrzut ekranu z kodem programu Makecode:
![]()
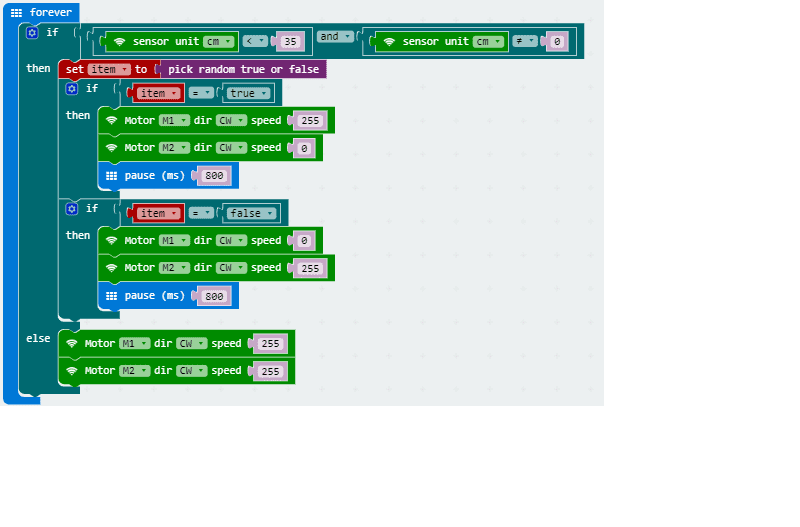
Unikanie przeszkód
Cel ćwiczenia:
- Nauka wykorzystania czujnika utradźwiękowego do kontroli jazdy robota Maqueen.Efekt:
- Czujnik utradżwiękowy sprawdza odległość pomiędzy robotem a najbliższą przeszkodą przed nim. Jeżeli odległość jest mniejsza niz 35 cm Maqueen losowo wybiera obrót w lewo lub prawo w celu ominięcia przeszkody.
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_Fa4Ef3DwyXW7
Zrzut ekranu z kodem programu Makecode:
Robot sterowany światłem
Cel ćwiczenia:
- Wykorzystanie czujnika światła do kontroli robota.Efekt:
- Maqueen stoi w miejscu gdy jest ciemno lub gdy oświetlenie jest poniżej zadanego progu a zaczyna jechać do przodu gdy oświetlimy go latarką. Prędkość robota jest uzależniona od mocy światła padającego na niego.
![]()
Link do kodu źródłowego w programie Makecode: https://makecode.microbit.org/_fi6DWjCKeM9v
Zrzut ekranu z kodem programu Makecode:
![]()
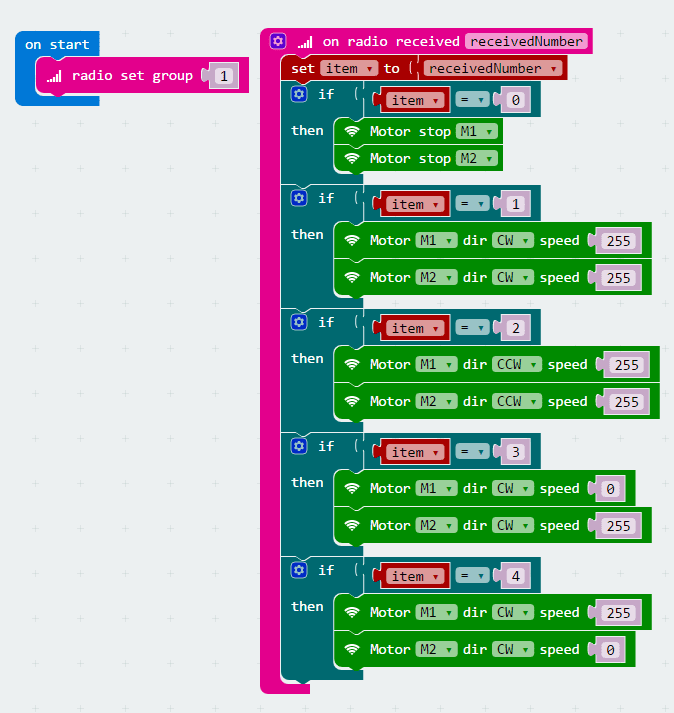
Bezprzewodowy kontroler micro: Gamepad i Maqueen
Cel ćwiczenia:
- Nauka zastosowania radiowego kontrolera GamePad do sterowania robota Maqueen.Efekt:
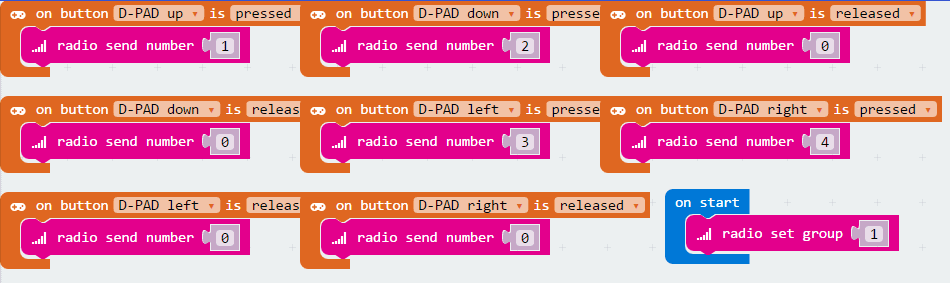
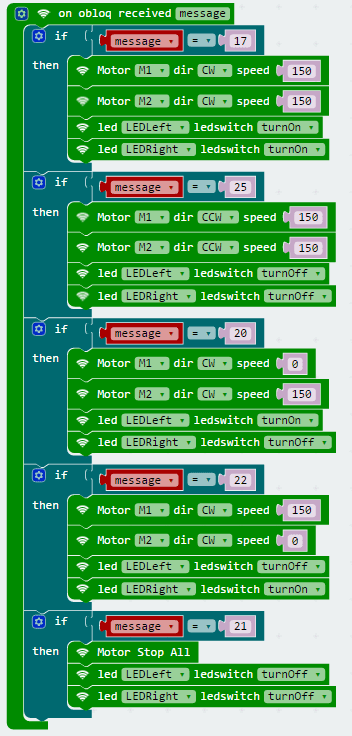
- Kontroler micro:bit Gamepad w czasie rzeczywistym steruje ruchem robota Maqueen (przyciski kontrolera odpowiadają ruchowi robota).
Uwaga! Do tego ćwiczenia potrzebny jest robot Maqueen oraz kontroler micro:bit Gamepad
wyposażony w drugi mikrokontroler micro:bit
Link do kodu źródłowego w programie Makecode dla robota Maqueen: https://makecode.microbit.org/_ftMMb8WkwDV7
Link do kodu źródłowego w programie Makecode dla kontrolera Gamepad: https://makecode.microbit.org/_gwK0A3JwEW0V
Zrzut ekranu z kodem dla robota Maqueen programu Makecode:
Zrzut ekranu z kodem dla kontrolera Gamepad programu Makecode: